Generating OBJ files
maliput_to_obj application allows to create an OBJ file from a maliput::api::RoadGeometry. The backends that can be selected to build the RoadGeometry are maliput_malidrive, maliput_multilane and maliput_dragway.
The application possesses flags to modify the OBJ mesh output. For example: the maximum size of a grid unit or whether to draw the elevation boundaries of lanes.
Depending on the maliput backend that is selected different flags related to the RoadGeometry building process will be active.
- maliput_malidrive backend: See MALIDRIVE_PROPERTIES_FLAGS().
- maliput_multilane backend: See MULTILANE_PROPERTIES_FLAGS().
- maliput_dragway backend: See DRAGWAY_PROPERTIES_FLAGS().
A description of all the available flags can be seen by running maliput_to_obj --help.
Note: This application consumes methods that are publicly provided by maliput package to generate OBJ files, so please refer to maliput::utility::GenerateObjFile() for further information if needed.
Let's use the default values of the OBJ builder configuration flags except for --max_grid_unit and --draw_elevation_bounds, which will be disabled to better see the meshes`.
As result two files are expected to be created in the selected dirpath:
- maliput_to_obj_tutorial.obj
- maliput_to_obj_tutorial.mtl
Then we can open maliput_to_obj_tutorial.obj using any free software for visualizing obj files, for example using MeshLab.
Optional: Create URDF file.
An .urdf file can also be created when the --urdf flag is passed:
Therefore, a maliput_to_obj_tutorial.urdf file will be created at the same location than the other files.
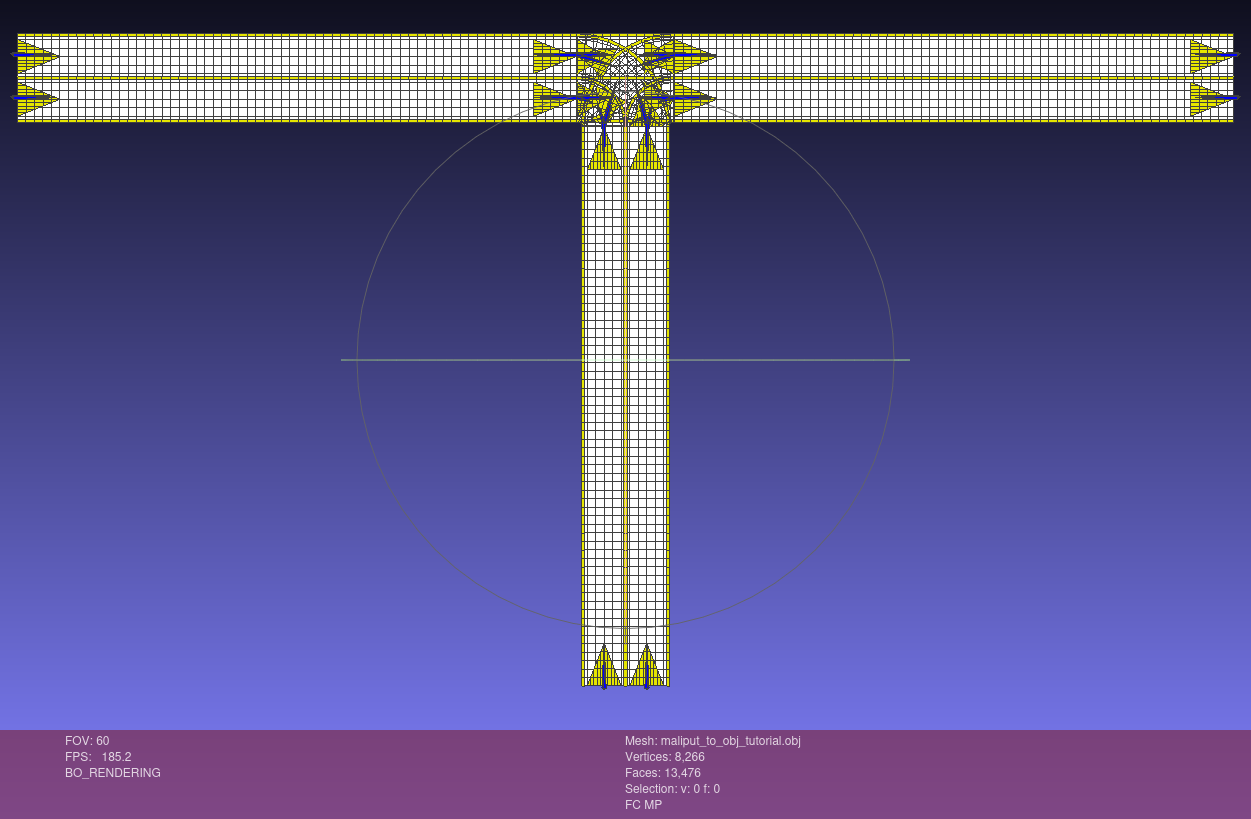
Using maliput_malidrive backend
Output:
Mesh visualization using MeshLab:
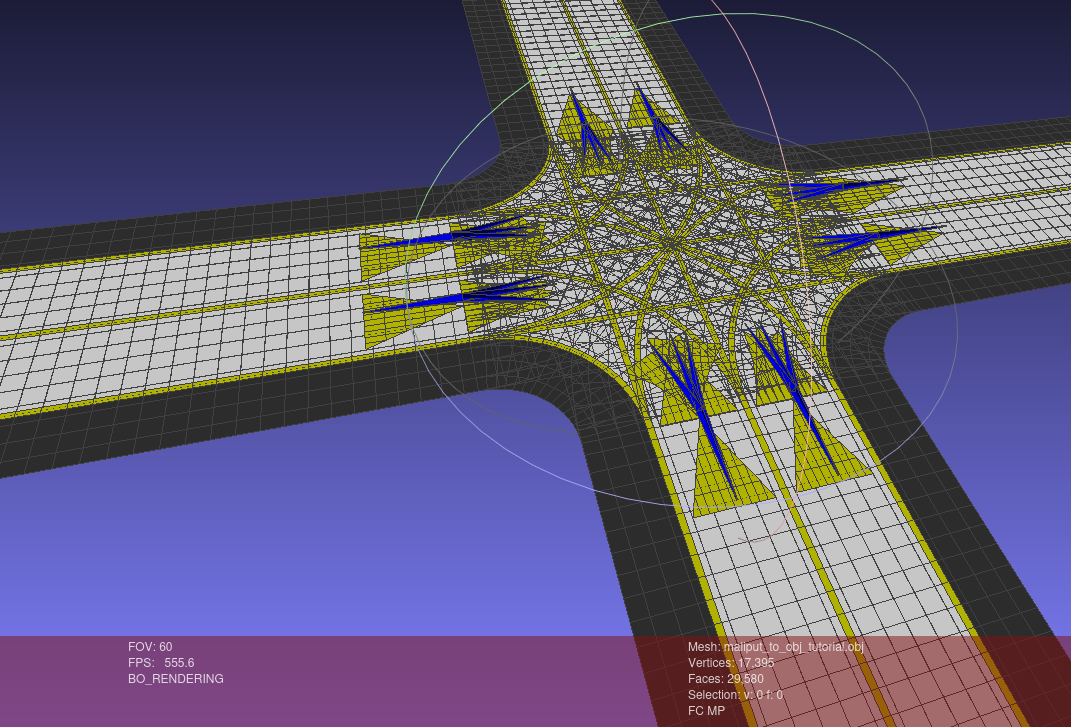
Using maliput_multilane backend
Similarly, maliput_multilane can be used.
Output:
Mesh visualization using MeshLab:
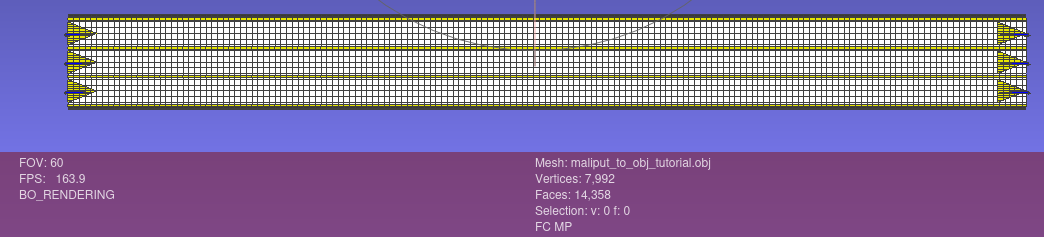
Using maliput_dragway backend
Similarly, maliput_dragway can be used.
Output:
Mesh visualization using MeshLab:
More available options
As mentioned before, maliput_to_obj application has several arguments that can be used. All of them can be accessed by running maliput_to_obj --help.
Use --log_level to set the log output See possible values at maliput::common::logger::level. By default set to unchanged.
